一、线性方程组
行初等变换
- 倍加变换:把某一行的倍数加到另一行上。
- 对换变换:把两行对换。
- 倍乘变换:把某一行的所有元素乘以同一个非零数。
线性方程组
\[\begin{aligned} a_{11}x_1 + a_{12}x_2 + \cdots + a_{1n}x_n &= b_1 \\ a_{21}x_1 + a_{22}x_2 + \cdots + a_{2n}x_n &= b_2 \\ \vdots \\ a_{m1}x_1 + a_{m2}x_2 + \cdots + a_{mn}x_n &= b_m \end{aligned}\]它的系数矩阵
\[\begin{bmatrix} a_{11} & a_{12} & \cdots & a_{1n} \\ a_{21} & a_{22} & \cdots & a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ a_{m1} & a_{m2} & \cdots & a_{mn} \end{bmatrix}\]它的增广矩阵
\[\begin{bmatrix} a_{11} & a_{12} & \cdots & a_{1n} & b_1 \\ a_{21} & a_{22} & \cdots & a_{2n} & b_2 \\ \vdots & \vdots & \ddots & \vdots & \vdots \\ a_{m1} & a_{m2} & \cdots & a_{mn} & b_m \end{bmatrix}\]把每列记作向量 $\mathbf{a}_i$,即
\[\mathbf{[a_1 \quad a_2 \quad \cdots \quad a_n \quad b]}\]它的向量方程
\[x_1\mathbf{a}_1 + x_2\mathbf{a}_2 + \cdots + x_n\mathbf{a}_n = \mathbf{b}\]它的张成空间
\[\mathbf{Span}\{\mathbf{a_1, a_2, \cdots, a_n}\}\]它的矩阵方程
\[A\mathbf{x} = [\mathbf{a_1 a_2 \cdots a_n}] \begin{bmatrix} x_1 \\ x_2 \\ \vdots \\ x_n \end{bmatrix} = x_1\mathbf{a}_1 + x_2\mathbf{a}_2 + \cdots + x_n\mathbf{a}_n\]由 $\mathbb{R}^n$ 到 $\Bbb R^m$ 的一个变换(或称函数、映射) $T$ 记为 $\Bbb R^n \to \Bbb R^m$。对 $\Bbb R^n$ 中的每个 $x$,$T(x)$ 由 $A(x)$ 计算得到,对应的矩阵变换记为 $x \to Ax$。矩阵 $A$ 也称为线性变换 $T$ 的标准矩阵。
1.3 向量方程
线性组合张成的集合
线性代数一个主要思想是研究可以表示为某一 固定向量集合 $\{\mathbf{v_1,v_2,\cdots,v_p}\}$ 的线性组合的所有向量。
定义 $\quad$ 若 $\{\mathbf{v_1,v_2,\cdots,v_p}\}$ 是 $\Bbb R^n$ 中的向量,则 $\{\mathbf{v_1,v_2,\cdots,v_p}\}$ 的所有线性组合所成的集合用记号 $\mathbf{Span}\{\mathbf{v_1,v_2,\cdots,v_p}\}$ 表示,称为由 $\{\mathbf{v_1,v_2,\cdots,v_p}\}$ 生成(或张成)的 $\Bbb R^n$ 子集。也就是说,$\mathbf{Span}\{\mathbf{v_1,v_2,\cdots,v_p}\}$ 是所有 \(c_1\mathbf{v}_1 + c_2\mathbf{v}_2 + \cdots + c_p\mathbf{v}_p\)
所表示的向量的集合,其中 $c_1,c_2,\cdots,c_p$ 为标量。即,
\[\mathbf{Span}\{\mathbf{v_1,v_2,\cdots,v_p}\} = \{c_1\mathbf{v}_1 + c_2\mathbf{v}_2 + \cdots + c_p\mathbf{v}_p\}\]存在性与惟一性
线性方程组
-
是相容的,则它有一个或无穷多个解;
-
是不相容的,则它无解。
| 相容 | 相容 | 不相容 |
|---|---|---|
| 惟一解 | 无穷解 | 无解 |
| 没有自由变量 (线性无关) |
有自由变量 (线性相关) |
|
| 系数矩阵 $A$ 在每一行都有主元位置 | 增广矩阵最右列存在主元,即存在如下形式 $\mathbf{[0 \cdots 0 \; b] \; (b\ne0)}$ |
|
| $\mathbf b$ 不属于 $\mathbf{Span}\{\mathbf{a_1, a_2, \cdots, a_n\}}$ | ||
| 齐次方程 $Ax=0$ 仅有平凡解 | 齐次方程 $Ax=0$ 有非平凡解 | 方程 $Ax$ 无解 |
| 映射 $T: \Bbb R^n \to \Bbb R^m$ 是单射(一对一) | 映射 $T: \Bbb R^n \to \Bbb R^m$ 是满射但不是单射 | 映射 $T$ 没有将 $\Bbb R^n$ 映射到 $\Bbb R^m$ 上 |
自由变量,矩阵的列数量大于行数量
线性无关
$\Bbb R^m$ 中的一组向量$\mathbf{\{a_1,\cdots,a_n\}}$ 称为
-
线性无关 $\quad$ 若向量方程 \(x_1\mathbf{a}_1 + x_2\mathbf{a}_2 + \cdots + x_n\mathbf{a}_n = \mathbf{0}\) 只有 $\mathbf{x=0}$ ($\Bbb R^m$ 中的零向量) 这一个解(平凡解),则称这组向量是线性无关的。
-
线性相关 $\quad$ 若存在不全为零的权 $x_1,\cdots,x_n$,使 \(x_1\mathbf{a}_1 + x_2\mathbf{a}_2 + \cdots + x_n\mathbf{a}_n = \mathbf{0}\) 即至少有一个向量是其它向量的线性组合 \(x_1\mathbf{a}_1 + x_2\mathbf{a}_2 + \cdots + x_{n-1}\mathbf{a}_{n-1} = x_j\mathbf{a}_j\) 也就是说向量 $\mathbf a_j$ 落在了其它向量张成的空间中。
矩阵 $A$ 的各列线性无关,当且仅当方程 $A\mathbf x=\mathbf 0$ 仅有平凡解。
两个向量的集合 $\{v_1,v_2\}$ 线性相关,当且仅当其中一个向量是另一个向量的倍数。
若一个向量组的向量个数超过每个向量的元素个数时,这个向量组线性相关。也就是说 $\Bbb R^m$ 中的任意向量组 $\mathbf{\{a_1,\cdots,a_n\}}$,当 $n \gt m$ 时线性相关。
若向量组中包括 $\mathbf{\{a_1,\cdots,a_n\}}$ 零向量,则它线性相关。
1.8 线性变换介绍
由 $\Bbb R^n$ 到 $\Bbb R^m$ 的一个变换 (或称函数、映射) $T$ 是一个规则,它把 $\Bbb R^n$ 中的每个向量 $\mathbf{x}$ 对应以 $\Bbb R^m$ 中的一个向量 $T(\mathbf{x})$. 集 $\Bbb R^n$ 称为 $T$ 的定义域,而 $\Bbb R^m$ 称为 $T$ 的余定义域 (或取值空间). 符号 $T: \Bbb R^n \to \Bbb R^m$ 说明 $T$ 的定义域是 $\Bbb R^n$ 而余定义域是 $\Bbb R^m$,对于 $\Bbb R^n$ 中的向量 $\mathbf{x}$,$\Bbb R^m$ 中的向量 $T(\mathbf{x})$ 称为 $\mathbf{x}$ (在 $T$ 作用下) 的像. 所有像 $T(\mathbf{x})$ 的集合称为 $T$ 的值域.
定义 $\quad$ 变换 (或映射) $T$ 是线性的,若
- 对 $T$ 的定义域中一切 $\mathbf{u,v},T(\mathbf{u+v})=T(\mathbf{u})+T(\mathbf{v})$.
- 对一切 $\mathbf{u}$ 和标量 $c,T(c\mathbf{u})=cT(\mathbf{u})$.
每个矩阵变换都是线性变换.
1.9 线性变换的矩阵
定理 10 $\quad$ 设 $T:\Bbb R^n \to \Bbb R^m$ 为线性变换,则存在惟一的矩阵 $A$,使
\[T(\mathbf{x}) = A\mathbf{x},对 \Bbb R^n 中的一切 \mathbf{x}\]事实上,$A$ 是 $m \times n$ 矩阵,它的第 $j$ 列是向量 $T(\mathbf{e}_j)$,其中 $\mathbf{e}_j$ 是单位矩阵 $I_n$ 的第 $j$ 列:
\[A = [T(\mathbf{e}_1) \quad \cdots \quad T(\mathbf{e}_n)] \tag{1.3}\label{eq1.3}\]\eqref{eq1.3} 中矩阵 $A$ 称为线性变换 $T$ 的标准矩阵.
术语线性变换强调映射的性质,而矩阵变换描述这样的映射如何实现.
二、矩阵代数
2.1 矩阵运算
矩阵转置
\[(AB \cdots N)^T = N^T \cdots B^T A^T\]2.2 矩阵的逆
初等矩阵
把单位矩阵进行一次行变换,就得到初等矩阵。
\[\begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \xrightarrow{\text{倍加变换}} \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ -3 & 0 & 1 \end{bmatrix} \qquad \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \xrightarrow{\text{对换变换}} \begin{bmatrix} 0 & 1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1 \end{bmatrix} \qquad \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \xrightarrow{\text{倍乘变换}} \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 5 \end{bmatrix}\]若对 $m \times n$ 矩阵 $A$ 进行某种初等行变换,所得矩阵可以写成 $EA$,其中 $E$ 是 $m \times m$ 矩阵,是由 $I_m$ 进行同一行变换所得。
定理 7 $\quad$ 若 $n \times n$ 矩阵 $A$ 可逆,当且仅当 $A$ 行等价于 $I_n$,这时,把 $A$ 变成 $I_n$ 的一系列初等行变换同时把 $I_n$ 变为 $A^{-1}$。于是,
\[AA^{-1} = I \quad 且 \quad A^{-1}A = I\]若 $A$ 是可逆 $n \times n$ 矩阵,则对每一 $\Bbb R^n$ 中的 $\mathbf b$,方程 $Ax = \mathbf b$ 有惟一解 $x = A^{(-1)}\mathbf b$
若 $A、B、 \cdots、 N$ 是 $n \times n$ 可逆矩阵,$AB \cdots N$ 也可逆。
\[(AB \cdots N)^{(-1)} = N^{(-1)} \cdots B^{(-1)} A^{(-1)}\]若 $A$ 可逆,则 $A^T$ 也可逆
\[(A^T)^{(-1)} = (A^{(-1)})^T\]2.3 可逆矩阵的特征
定理 8 $\quad$ (可逆矩阵定理)
设 $A$ 为 $n \times n$ 矩阵,下列命题等价,即它们同时为真或同时为假
- $A$ 是可逆矩阵
- $A$ 等价于 $n \times n$ 单位矩阵
- $A$ 有 $n$ 个主元位置
- 方程 $Ax=0$ 仅有平凡解
- $A$ 的各列线性无关
- 线性变换 $x \mapsto Ax$ 是一对一的
- 对 $\Bbb R^n$ 中任意 $b$, 方程 $Ax=b$ 至少有一个解
- $A$ 的各列生成 $\Bbb R^n$
- 线性变换 $x \mapsto Ax$ 把 $\Bbb R^n$ 映射到 $\Bbb R^n$ 上
- 存在 $n \times n$ 矩阵 $C$ 使 $CA=I$
- 存在 $n \times n$ 矩阵 $D$ 使 $AD=I$
- $A^T$ 是可逆矩阵
内积和外积
将 $\Bbb R^n$ 中向量看作 $n \times 1$ 矩阵,对 $\Bbb R^n$ 中的 $\mathbf{u, v}$,
-
矩阵乘积 $\mathbf u^T \mathbf v$ 是 $1 \times 1$ 矩阵,称为 $\mathbf u$ 和 $\mathbf v$ 的 内积或数量积;
-
矩阵乘积 $\mathbf{uv}^T$ 是 $n \times n$ 矩阵,称为 $\mathbf u$ 和 $\mathbf v$ 的 外积或向量积。
\[\begin{aligned} \mathbf{uv}^T &= \begin{bmatrix} u_1 \\ u_2 \\ u_3 \end{bmatrix} [v_1 \quad v_2 \quad v_3] \\ &= \begin{bmatrix} \color{red}{u_1} & u_1 & u_1 \\ \color{red}{u_2} & u_2 & u_2 \\ \color{red}{u_3} & u_3 & u_3 \end{bmatrix} \odot \begin{bmatrix} \color{green}{v_1} & \color{green}{v_2} & \color{green}{v_3} \\ v_1 & v_2 & v_3 \\ v_1 & v_2 & v_3 \end{bmatrix} \\ &= \begin{bmatrix} \color{red}{u_1}\color{green}{v_1} & u_1\color{green}{v_2} & u_1\color{green}{v_3} \\ \color{red}{u_2}v_1 & u_2v_2 & u_2v_3 \\ \color{red}{u_3}v_1 & u_3v_2 & u_3v_3 \end{bmatrix} \end{aligned}\]octave 中可以用 meshgrid 函数得到 $\mathbf{u ,v}$ 的外积
2.4 分块矩阵
\[AB = A[\mathbf{b_1 \; b_2 \; \cdots b_n}] = [A\mathbf b_1 \; A\mathbf b_2 \; \cdots A\mathbf b_n]\]计算 $AB$ 的行列法则
\[(AB)_{ij} = \sum_{r=1}^k a_{ir}b_{rj} = a_{i1}b_{1j} + a_{i2}b_{2j} + \cdots + a_{ik}b_{kj}\]定理 10 $\quad$ ($AB$ 的列行展开)
若 $A$ 是 $m \times n$ 矩阵,$B$ 是 $n \times p$ 矩阵,则
\[\begin{aligned} AB &= [\mathrm{col_1}(A) \quad \mathrm{col_2}(A) \quad \cdots \quad \mathrm{col_n}(A)] \begin{bmatrix} \mathrm{row_1}(B) \\ \mathrm{row_2}(B) \\ \vdots \\ \mathrm{row_n}(B) \\ \end{bmatrix} \\ &= \mathrm{col_1}(A)\mathrm{row_1}(B) + \mathrm{col_2}(A)\mathrm{row_2}(B) + \cdots + \mathrm{col_n}(A)\mathrm{row_n}(B) \end{aligned}\]上面每一项的乘积 $\mathrm{col_k}(A)\mathrm{row_k}(B)$ 都是外积。
2.8 $\Bbb R^n$ 的子空间
定义 $\quad$ $\Bbb R^n$ 中的一个子空间是 $\Bbb R^n$ 中的集合 $H$,具有以下三个性质,
- 零向量属于 $H$
- 对 $H$ 中的任意向量 $\mathbf{u}$ 和 $\mathbf{v}$,$\mathbf{u+v}$ 属于 $H$
- 对 $H$ 中的任意向量 $\mathbf{u}$ 和数 $c$,$c\mathbf{u}$ 属于 $H$
换句话说,子空间对加法和标量乘法是封闭的。注意 $\Bbb R^n$ 是它本身的子空间。
设 $\mathbf{v_1,\cdots,v_p}$ 属于 $\Bbb R^n$,$\mathbf{v_1,\cdots,v_p}$ 的所有线性组合是 $\Bbb R^n$ 的子空间,也就是说,$H = \mathbf{Span}\{\mathbf{v_1,\cdots,v_p}\}$,则 $H$ 是 $\Bbb R^n$ 的子空间。我们称 $\mathbf{Span}\{\mathbf{v_1,\cdots,v_p}\}$ 为由 $\mathbf{v_1,\cdots,v_p}$ 生成(或张成)的子空间。
矩阵的列空间与零空间
列空间定义 $\quad$ 矩阵 $A$ 的列空间是 $A$ 的各列的线性组合的集合,记作 $\mathrm{Col}\;A$
$m \times n$ 矩阵 $A=[\mathbf{a}_1,\cdots,\mathbf{a}_n]$,它的各列属于 $\Bbb R^m$,列空间是 $\Bbb R^m$ 的子空间。
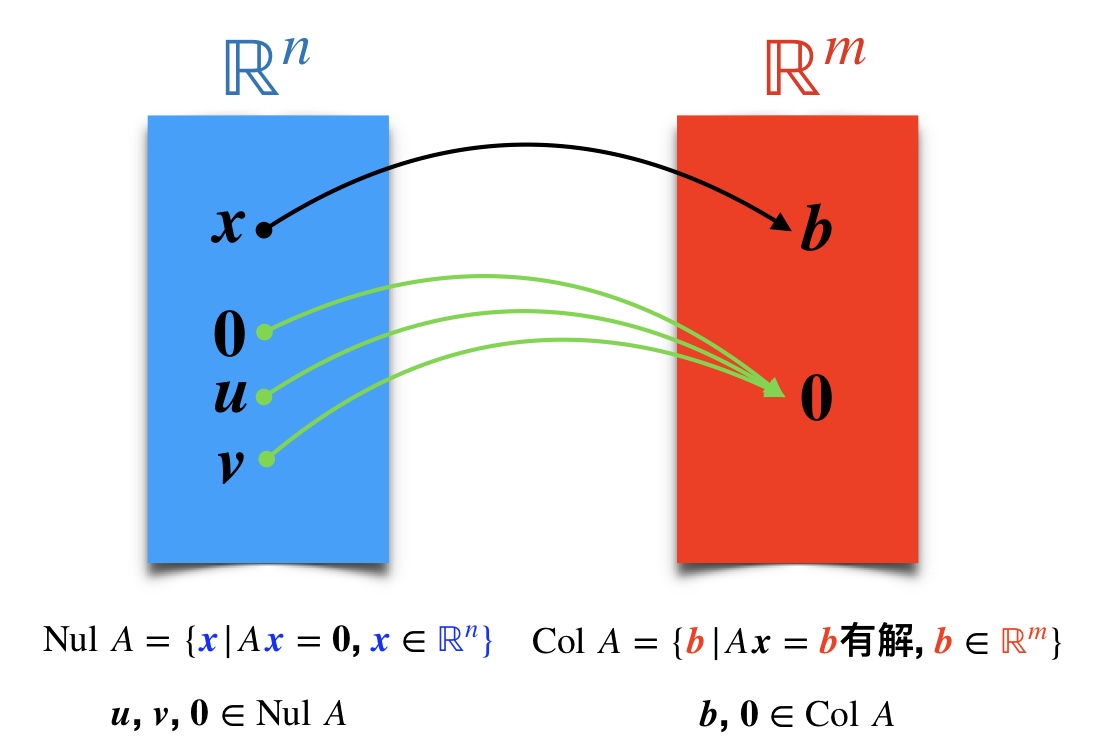
零空间定义 $\quad$ 矩阵 $A$ 的零空间是齐次方程 $A\mathbf{x}=0$ 所有解的集合,记为 $\mathrm{Nul}\;A$
当 $A$ 有 $n$ 列时,$Ax=0$ 的解属于 $\Bbb R^n$,$A$ 的零空间是 $\Bbb R^n$ 上的子集。
定理 12 $\quad$ $m \times n$ 矩阵 $A$ 的零空间是 $\Bbb R^n$ 的子空间。等价的,$n$ 个未知数的 $m$ 个齐次线性方程的解的全体是 $\Bbb R^n$ 的子空间。
这里要注意,$m \times n$ 矩阵 $A$ 的列空间是所有使方程 $Ax=b$ 有解的向量 $\mathbf{b}$ 的集合,属于 $\Bbb R^m$。零空间是齐次方程 $A\mathbf{x}=0$ 所有的解向量 $\mathbf{x}$ 的集合,属于 $\Bbb R^n$。
从映射的角度看 $T: \Bbb R^n \to \Bbb R^m$,列空间属于值域(值域是余定义域 $\Bbb R^m$ 上的子集),零空间属于定义域 $\Bbb R^n$ 上的子集。
子空间的基
定义 $\quad$ $\Bbb R^n$ 中子空间 $H$ 的一组基是 $H$ 中的一个线性无关集,它生成 $H$
矩阵 $A$ 的主元列构成列空间的基。
2.9 维数与秩
坐标系
定义 $\quad$ 假设 $\mathcal{B} = [\mathbf{b_1,\cdots,b_p}]$ 是子空间 $H$ 的一组基,对 $H$ 中的每一个向量 $\mathbf x$,相对于基 $\mathcal{B}$ 的坐标是使 $\mathbf{x} = c_1\mathbf{b}_1 + \cdots + c_p\mathbf{b}_p$ 成立的权值 $c_1,\cdots,c_p$,且是 $\Bbb R^p$ 中的向量
\[[\mathbf{x}]_{\mathcal{B}} = \begin{bmatrix} c_1 \\ c_2 \\ \vdots \\ c_p \end{bmatrix}\]称为 $\mathbf{x}$ (相对于 $\mathcal{B}$) 的坐标向量,或 $\mathbf{x}$ 的 $\mathcal{B}$-坐标向量。
注意,$H$ 的一组基 $\mathcal{B}$ 确定 $H$ 上的一个“坐标系”,不同的基表示 $H$ 的不同坐标系。因此 $H$ 中的一个向量 $\mathbf{x}$ 在不同的基上对应不同的坐标向量。
一般的,如果 $\mathcal{B} = \{\mathbf b_1,\cdots,\mathbf b_p\}$ 是 $H$ 的基,则映射 $x \mapsto [x]_{\mathcal{B}}$ 是使 $H$ 和 $\Bbb R^p$ 形态一样的一一映射($H$ 中向量的元素个数有可能多于 $p$ 个),且 $H$ 与 $\Bbb R^p$ 同构。
子空间的维数
维数定义 $\quad$ 非零子空间 $H$ 的维数,用 $\dim H$ 表示,是 $H$ 的任意一个基的向量个数,零子空间 $\{\mathbf 0\}$ 的维数定义为零。
- $\Bbb R^n$ 空间维数为 $n$,$\Bbb R^n$ 的每个基由 $n$ 个向量组成。
- 矩阵 $A$ 的零空间 $\mathrm{Nul}A$ 的维数,等于 $A\mathbf x = \mathbf 0$ 中自由变量的个数。
秩的定义 $\quad$ 矩阵 $A$ 的秩(记为 rank $A$)是 $A$ 的列空间的维数。
\[\mathrm{rank}A = \dim \mathrm{Col}A\]- $A$ 的主元列形成 $\mathrm{Col}A$ 的一个基,$A$ 的秩正好是 $A$ 的主元列个数。
- 非主元列对应于 $Ax=0$ 中自由变量的个数,$\mathrm{Nul}A$ 的维数正好是非主元列的个数。
定理 14 $\quad$ (秩定理)
如果矩阵 $A$ 有 $n$ 列,则 $\mathrm{rank}A + \dim\mathrm{Nul}A = n$.
定理 15 $\quad$ (基定理)
设 $H$ 是 $\Bbb R^n$ 的 $p$ 维子空间,$H$ 中的任何恰好由 $p$ 个成员组成的线性无关集构成 $H$ 的一个基. 并且,$H$ 中任何生成 $H$ 的 $p$ 个向量集也构成 $H$ 的一个基。
秩与可逆矩阵定理
定理 $\quad$ (可逆矩阵定理 (续))
设 $A$ 是一 $n \times n$ 矩阵,则下面每个命题与 $A$ 是可逆矩阵的命题等价:
- $A$ 的列向量构成 $\Bbb R^n$ 的一个基
- $\mathrm{Col}A = \Bbb R^n$
- $\dim\mathrm{Col}A = n$
- $\mathrm{rank}A = n$
- $\mathrm{Nul}A = {0}$
- $\dim\mathrm{Nul}A = 0$
三、行列式
3.1 行列式介绍
对于 $1 \times 1$ 矩阵,设 $A=[a]$,定义 $\det A = a$.
对于 $2 \times 2$ 矩阵,设 $A=\begin{bmatrix} a & b \\ c & d \end{bmatrix}$,定义 $\det A = ad-bc$
当 $n \ge 2$,$n \times n$ 矩阵 $A=[a_{ij}]$ 的行列式的定义如下:
\[\begin{aligned} \det A &= a_{11}\cdot\det A_{11} - a_{12}\cdot\det A_{12} + \cdots + (-1)^{1+n}a_{1n}\cdot\det A_{1n} \\ &= \sum_{j=1}^n(-1)^{1+j}a_{1j}\det A_{1j} \end{aligned}\]这里元素 $a_{11}, a_{12}, \cdots, a_{1n}$ 来自 $A$ 的第一行,$A_{11}, A_{12}, \cdots, A_{1n}$ 由 $A$ 中划去第一行和对应列得到,对任意方阵 $A$,令 $A_{ij}$ 表示通过划掉 $A$ 中第 $i$ 行和第 $j$ 列而得到的子矩阵。这给出了行列式的一个递归定义,当 $n=3$ 时,$\det A$ 由 $2 \times 2$ 子矩阵 $A_{1j}$ 的行列式来定义。
对于 $A=[a_{ij}]$,$A$ 的 $(i,j)$ 余因子 $C_{ij}$ 由下式给出
\[\color{red}{C_{ij} = (-1)^{i+j}\det A_{ij}}\]则前面 $\det A$ 的定义可以改写为
\[\det A = a_{11} \cdot C_{11} + a_{12} \cdot C_{12} + \cdots + a_{1n} \cdot C_{1n}\]这个公式称为按 $A$ 的第一行的余因子展开式。
定理 1 $\quad n \times n$ 矩阵 $A$ 的行列式可按任意行或列的余因子展开式来计算。
-
按第 $i$ 行展开
\[\det A = a_{i1} \cdot C_{i1} + a_{i2} \cdot C_{i2} + \cdots + a_{in} \cdot C_{in}\] -
按第 $j$ 列展开
\[\det A = a_{1j} \cdot C_{1j} + a_{2j} \cdot C_{2j} + \cdots + a_{nj} \cdot C_{nj}\]
定理 2 $\quad$ 若 $A$ 为三角阵,则 $\det A$ 等于 $A$ 主对角线上元素的乘积。
3.2 行列式的性质
定理 3 $\quad$ (行变换)
令 $A$ 是一个方阵
$\quad$ a. $A$ 倍加变换后得矩阵 $B$,则 $\det B = \det A$
$\quad$ b. $A$ 对换变换后得矩阵 $B$,则 $\det B = -\det A$
$\quad$ c. $A$ 倍乘变换(k倍)后得矩阵 $B$,则 $\det B = k\cdot\det A$
若一个方阵 $A$ 被行倍加和行交换化简为阶梯形 $U$,且此过程经过了 $r$ 次行交换,则定理 3表明
\[\det A = (-1)^r \det U\]由于 $U$ 是阶梯形,它是三角阵,因此 $\det U$ 是主对角线上元素 $u_{11},\cdots,u_{nn}$ 的乘积. 若 $A$ 可逆,则元素 $u_{ii}$ 都是主元. 否则,至少有 $u_{nn}$ 等于零,使得乘积 $u_{11} \cdots u_{nn}$ 为零。从而有以下公式
\[\det A = \begin{cases} (-1)^r \cdot u_{11} \cdot u_{22} \cdots u_{nn} & 当A可逆 \\ 0 & 当A不可逆 \end{cases}\]定理 4 $\quad$ 方阵 $A$ 是可逆的当且仅当 $\det A \ne 0$
如果 $A$ 的列线性相关,则 $\det A = 0$
列变换
定理 5 $\quad$ 若 $A$ 为一个 $n \times n$ 矩阵,则 $\det A^T = \det A$
行列式与矩阵乘积
定理 6 $\quad$ (乘法的性质)
若 $A$ 和 $B$ 均为 $n \times n$ 矩阵,则 $\det AB = (\det A)(\det B)$
3.3 克拉默法则、体积和线性变换
定理 7 $\quad$ (克拉默法则)
设 $A$ 是一个 $n \times n$ 可逆矩阵,对 $\Bbb R^n$ 中任意向量 $b$,方程 $Ax=b$ 的惟一解可由下式给出
\[x_i = \dfrac{\det A_i(\mathbf b)}{\det A}, i=1,2,\cdots n\]其中 $A_i(\mathbf b)$ 表示 $A$ 中第 $i$ 列由向量 $\mathbf b$ 替换得到的矩阵 $A_i(\mathbf b) = [a_1 \; \cdots \; \mathbf b \; \cdots \; a_n]$
一个求 $A^{-1} 的公式$
\[A^{-1} = \dfrac{1}{\det A} \begin{bmatrix} C_{11} & C_{21} & \cdots & C_{n1} \\ C_{12} & C_{22} & \cdots & C_{n2} \\ \vdots & \vdots & \cdots & \vdots \\ C_{1n} & C_{2n} & \cdots & C_{nn} \end{bmatrix}\]上式右边余因子的矩阵称为 $A$ 的伴随矩阵,记为 $\mathrm{adj}A$
定理 8 $\quad$ (逆矩阵公式)
设 $A$ 是一个可逆 $n \times n$ 矩阵,则 $A^{-1}=\dfrac{1}{\det A}\mathrm{adj}A$.
用行列式表示面积或体积
定理 9 $\quad$ 若 $A$ 是一个 $2 \times 2$ 矩阵,则由 $A$ 的列确定的平行四边形的面积为 $|\det A|$,若 $A$ 是一个 $3 \times 3$ 矩阵,则由 $A$ 的列确定的平行六面体的体积为 $|\det A|$。
例如 $A$ 为 $2 \times 2$ 对角矩阵,则
\[\left|\det\begin{bmatrix} a & 0 \\ 0 & b \end{bmatrix}\right| = |ad| = 矩阵的面积\]若 $A$ 不为对角矩阵,通过倍加和对换变换,总可以使 $A$ 变换成对角矩阵。
线性变换
定理 10 $\quad$ 设 $T: \Bbb R^2 \to \Bbb R^2$ 是一个由 $2 \times 2$ 矩阵 $A$ 确定的线性变换,若 $S$ 是 $\Bbb R^2$ 中的一个平行四边形,则
\[\{T(S)的面积\} = |\det A| \cdot \{S的面积\}\]对于 $\Bbb R^3$,则
\[\{T(S)的体积\} = |\det A| \cdot \{S的体积\}\]定理 10 的结论对 $\Bbb R^2$ 中任意有限面积的区域或 $\Bbb R^3$ 中任意有限体积的区域均成立。
四、向量空间
4.1 向量空间与子空间
定义 $\quad$ 一个向量空间是由一些被称为向量的对象构成的非空集合 $V$,在这个集合上定义两个运算,称为加法和标量乘法(标量取实数),服从以下公理(或法则),这些公理必须对 $V$ 中所有向量 $\mathbf{u,v,w}$及所有标量 $c$ 和 $d$ 均成立。
- $\mathbf{u,v}$ 之和表示为 $\mathbf{u+v}$,仍在 $V$ 中
- $\mathbf{u+v = v+u}$ (加法交换律, commutativity)
- $\mathbf{(u+v)+w = u+(v+w)}$ (加法结合律, associativity)
- $V$ 中存在一个零向量 $\mathbf{0}$,使得 $\mathbf{u+0=u}$
- 对 $V$ 中每个向量 $\mathbf{u}$,存在 $V$ 中向量 $-\mathbf{u}$,使得 $\mathbf{u+(-u)=0}$ (加法逆元, additive inverse)
- $\mathbf{u}$ 与标量 $c$ 的标量乘法记为 $c\mathbf{u}$,仍在 $V$ 中
- $c\mathbf{(u+v)}=c\mathbf{u}+c\mathbf{v}$ (分配性质, distributive property)
- $(c+d)\mathbf{u}=c\mathbf{u}+d\mathbf{u}$ (分配性质, distributive property)
- $c(d\mathbf{u})=(cd)\mathbf{u}$ (乘法结合律, associativity)
- $1\mathbf{u}=\mathbf{u}$ (单位元, identities)
子空间
定义 $\quad$ 向量空间 $V$ 中的一个子空间是 $V$ 的一个满足以下三个性质的子集 $H$:
- $V$ 中的零向量在 $H$ 中
- $H$ 对向量加法封闭,即对 $H$ 中任意向量 $\mathbf{u,v}$,和$\mathbf{u+v}$ 仍在 $H$ 中
- $H$ 对标量乘法封闭,即对 $H$ 中任意向量 $\mathbf{u}$ 和任意标量 $\mathbf{c}$,向量$c\mathbf{u}$ 仍在 $H$ 中
向量空间 $V$ 中仅由零向量组成的集合是 $V$ 的一个子空间,称为零子空间,写成 {$\mathbf{0}$}。
向量空间 $\Bbb R^2$ 不是 $\Bbb R^3$ 的子空间,因为 $\Bbb R^2$ 甚至不是 $\Bbb R^3$ 的子集( $\Bbb R^3$ 中的向量有3个分量,而 $\Bbb R^2$ 中的向量仅有两个分量),集合
\[H = \left\{ \begin{bmatrix} s \\ t \\ 0 \end{bmatrix} : s,t是实数 \right\}\]是 $\Bbb R^3$ 的一个子集。
定理 1 $\quad$ 若 $\mathbf{v_1,\cdots,v_p}$ 是在向量空间 $V$ 中,则 $\mathbf{Span}\{v_1,\cdots,v_p\}$ 是 $V$ 的一个子空间。
4.2 零空间、列空间和线性变换
矩阵的零空间
定义 $\quad m \times n$ 矩阵 $A$ 的零空间写成 $\mathrm{Nul}A$,是齐次方程 $A\mathbf{x}=\mathbf{0}$ 的全体解的集合,用集合符号表示,即 \(\mathrm{Nul}A = \{\mathbf{x}:\mathbf{x} \in \Bbb R^n,A\mathbf{x}=\mathbf{0}\}\)
定理 2 $\quad$ $m \times n$ 矩阵 $V$ 的零空间是 $\Bbb R^n$ 的一个子空间。
矩阵的列空间
定义 $\quad m \times n$ 矩阵的列空间写成 $\mathrm{Col}A$ 是由 $A$ 的列的所有线性组合组成的集合,若 $A = [\mathbf{a_1,\cdots,a_n}]$,则 $\mathrm{Col}A=\mathbf{Span}\{\mathbf{a_1,\cdots,a_n}\}$
定理 3 $\quad m \times n$ 矩阵 $A$ 列空间是 $\Bbb R^m$ 的一个子空间。
\[\mathrm{Col}A = \{\mathbf{b}:\mathbf{b}=A\mathbf{x},\mathbf{x} \in \Bbb R^n\}\]对 $m \times n$ 矩阵 $A$,$\mathrm{Nul}A$ 与 $\mathrm{Col}A$ 的对比
| $\mathrm{Nul}A$ | $\mathrm{Col}A$ |
|---|---|
| 1. $\mathrm{Nul}A$ 是 $\Bbb R^n$ 的一个子空间 | 1. $\mathrm{Col}A$ 是 $\Bbb R^m$ 的一个子空间 |
| 2. $\mathrm{Nul}A$ 是隐式定义的,即只给出了一个 $\mathrm{Nul}A$ 中向量必须满足的条件( $A\mathbf{x}=\mathbf{0}$ ) | 2. $\mathrm{Col}A$ 是显示定义,即明确指出如何建立 $\mathrm{Col}A$ 中的向量 |
| 3. 求 $\mathrm{Nul}A$ 中的向量需要时间,需要对 $[A \mathbf{0}]$ 做行变换 | 3. 容易求出 $\mathrm{Col}A$ 中的向量,$A$ 中的列就是 $\mathrm{Col}A$ 中的向量,其余的可由 $A$ 的列表示出来 |
| 4. $\mathrm{Nul}A$ 与 $A$ 的数值之间没有明显关系 | 4. $\mathrm{Col}A$ 与 $A$ 的数值之间有明显的关系,因为 $A$ 的列就在 $\mathrm{Col}A$ 中 |
| 5. $\mathrm{Nul}A$ 中的一个典型向量 $v$ 具有 $A\mathbf{v}=\mathbf{0}$ 的性质 | 5. $\mathrm{Col}A$ 中的一个典型向量 $v$ 具有方程 $A\mathbf{x}=\mathbf{v}$ 是相容的性质 |
| 6. 给一个特定的向量 $\mathbf{v}$,容易判断 $\mathbf{v}$ 是否在 $\mathrm{Nul}A$ 中,只需要计算 $A\mathbf{v}$ | 6. 给定一个特定的向量 $\mathbf{v}$,弄清 $\mathbf{v}$ 是否在 $\mathrm{Col}A$ 中需要时间,需要对 $[A\;\mathbf{v}]$ 作行变换 |
| 7. $\mathrm{Nul}A = \{\mathbf{0}\}$ 当且仅当方程 $A\mathbf{x}=\mathbf{0}$ 仅有平凡解 | 7. $\mathrm{Col}A = \Bbb R^m$ 当且仅当方程 $A\mathbf{x}=\mathbf{b}$ 对每个 $\mathbf{b} \in \Bbb R^m$ 有一个解 |
| 8. $\mathrm{Nul}A=\{0\}$ 当且仅当线性变换 $\mathbf{x} \to A\mathbf{x}$ 是一对一的 | 8. $\mathrm{Col}A = \Bbb R^m$ 当且仅当线性变换 $\mathbf{x} \to A\mathbf{x}$ 将 $\Bbb R^n$ 映射到 $\Bbb R^m$ 上 |
线性变换的核与值域
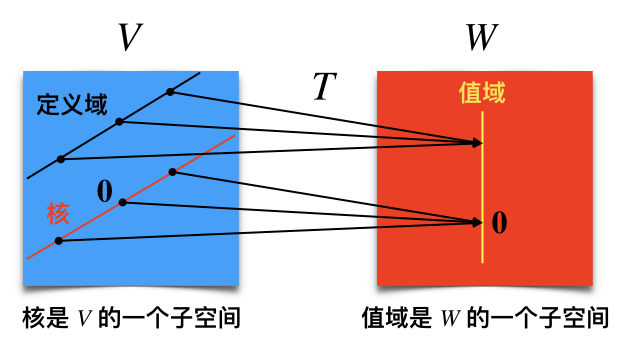
定义 $\quad$ 由向量空间 $V$ 映射到向量空间 $W$ 内的线性变换 $T$ 是一个规则,它将 $V$ 中每个向量 $\mathbf{x}$ 映射成 $W$ 中惟一向量 $T(\mathbf{x})$,且满足:
- $T(\mathbf{u+v})=T(\mathbf{u})+T(\mathbf{v})$,对 $V$ 中所有 $\mathbf{u,v}$ 均成立.
- $T(c\mathbf{u})=cT(\mathbf{u)}$,对 $V$ 中所有 $\mathbf{u}$ 及所有数 $c$ 均成立.
线性变换 $T$ 的核 (或零空间) 是 $V$ 中所有满足 $T(\mathbf{u})=\mathbf{0}$ 的向量 $\mathbf{u}$ 的集合 ($\mathbf{0}$ 为 $W$ 中的零向量). $T$ 的值域是 $W$ 中所有具有形式 $T(\mathbf{x})$ (任意 $\mathbf{x} \in V$) 的向量的集合. 如果 $T$ 是由一个矩阵变换得到的,比如对某矩阵 $A$,$T(\mathbf{x}=A\mathbf{x})$,则 $T$ 的核与值域恰好是 $A$ 的零空间和列空间。
4.3 线性无关集和基
定理 4 $\quad$ 不少于两个有编号的向量的集合 $\{\mathbf{v_1,\cdots,v_p}\}$,如果有 $\mathbf{v_1 \ne 0}$,则 $\{\mathbf{v_1,\cdots,v_p}\}$ 是线性相关的,当且仅当某 $\mathbf{v}_j(j\gt1)$ 是其前面向量 $\mathbf{v_1,\cdots,v_{j-1}}$ 的线性组合。
定义 $\quad$ 令 $H$ 是向量空间 $V$ 的一个子空间,$V$ 中向量的指标集 $\mathcal{B}=\{\mathbf{b_1,\cdots,b_p}\}$ 称为 $H$ 的一个基,如果
- $\mathcal{B}$ 是线性无关集
- 由 $\mathcal{B}$ 生成的子空间与 $H$ 相同,即 $H = \mathbf{Span}\{\mathbf{b_1,\cdots,b_p}\}$
令 $\mathbf{e_1,\cdots,e_n}$ 是 $n \times n$ 单位矩阵 $I_n$ 的列,集合 $\{\mathbf{e_1,\cdots,e_n}\}$ 称为 $\Bbb R^n$ 的标准基。
一个基是一个不包含不必要的向量的“高效率”的生成集(Spanning Set)。
定理 5 $\quad$ (生成集定理 Spanning Set Theorem)
若 $S=\{\mathbf{v_1,\cdots,v_p}\}$ 是 $V$ 中的向量集,$H=\mathbf{Span}\{\mathbf{v_1,\cdots,v_p}\}$
a. 若 $S$ 中某一向量,比如说 $\mathbf{v}_k$,是 $S$ 中其余向量的线性组合,则 $S$ 中去掉 $\mathbf{v}_k$ 后形成的集合仍然可以生成 $H$
b. 若 $H\ne\{\mathbf{0}\}$,则 $S$ 的某一子集是 $H$ 的一个基
$\mathrm{Nul}A$ 和 $\mathrm{Col}A$ 的基
矩阵的行初等变换不影响矩阵的列的线性相关关系
定理 6 $\quad$ 矩阵 $A$ 的主元列构成 $\mathrm{Col}A$ 的一个基
4.4 坐标系
对一个向量空间 $V$,明确指定一个基 $\mathcal{B}$ 的重要原因是在 $V$ 上强加一个“坐标系”,如果 $\mathcal{B}$ 包含 $n$ 个向量,则坐标系将使 $V$ 像 $\Bbb R^n$ 一样便于操作。
定理 7 $\quad$ (惟一表示定理)
令 $\mathcal{B}=\{\mathbf{b_1,\cdots,b_n}\}$ 是向量空间 $V$ 的一个基,则对 $V$ 中每个向量 $\mathbf{x}$,存在惟一的一组数 $c_1,\cdots,c_n$,使得
\[\mathbf{x} = \color{fuchsia}{c_1}\mathbf{b_1} + \cdots + \color{fuchsia}{c_n}\mathbf{b_n}\]定义 $\quad$ 假设集合 $\mathcal{B}=\{\mathbf{b_1,\cdots,b_n}\}$ 是 $V$ 的一个基,$\mathbf{x}$ 在 $V$ 中,$\mathbf{x}$ 相对于基 $\mathcal{B}$ 的坐标(或 $\mathbf{x}$ 的 $\mathcal{B}$-坐标)是使得 $\mathbf{x} = c_1\mathbf{b_1} + \cdots + c_n\mathbf{b_n}$ 的权 $c_1,\cdots,c_n$
若 $c_1,\cdots,c_n$ 是 $\mathbf{x}$ 的 $\mathcal{B}$-坐标,则 $\Bbb R^n$ 中的向量
\[[\mathbf{x}]_{\mathcal{B}} = \begin{bmatrix} \color{fuchsia}{c_1} \\ \vdots \\ \color{fuchsia}{c_n} \end{bmatrix}\]是 $\mathbf{x}$ (相对于 $\mathcal{B}$) 的坐标向量,或 $\mathbf{x}$ 的 $\mathcal{B}$-坐标向量,映射 $\mathbf{x} \mapsto [\mathbf{x}]_{\mathcal{B}}$ 称为 (由 $\mathcal{B}$ 确定的) 坐标映射。
$\Bbb R^n$ 中的坐标
令
\[P_{\mathcal{B}} = [\mathbf{b_1\;b_2\;\cdots\;b_n}]\]则向量方程
\[\mathbf{x} = \color{fuchsia}{c_1}\mathbf{b_1} + \color{fuchsia}{c_2}\mathbf{b_2} + \cdots + \color{fuchsia}{c_n}\mathbf{b_n}\]等价于
\[\mathbf{x} = P_{\mathcal{B}}\color{fuchsia}{[\mathbf{x}]_{\mathcal{B}}}\]我们称 $P_{\mathcal{B}}$ 为从 $\mathcal{B}$ 到 $\Bbb R^n$ 中标准基的坐标变换矩阵。通过左乘 $P_{\mathcal{B}}$ 将坐标向量 $[\mathbf{x}]_{\mathcal{B}}$ 变换到 $\mathbf{x}$。由于 $P_{\mathcal{B}}$ 的列构成 $\Bbb R^n$ 的一个基,$P_{\mathcal{B}}$ 是可逆的. 通过左乘 $P^{-1}_{\mathcal{B}}$ 又将 $\mathbf{x}$ 变回 $\mathcal{B}$-坐标向量:
\[P^{-1}_{\mathcal{B}}\mathbf{x} = [\mathbf{x}]_{\mathcal{B}}\]坐标映射 $\mathbf{x} \mapsto [\mathbf{x}]_{\mathcal{B}}$ 对应的矩阵即 $P^{-1}_{\mathcal{B}}$.
\[\require{AMScd} \begin{CD} \mathbf{x} @>{P^{-1}_{\mathcal{B}} (\mathcal{B}坐标向量})>> [\mathbf{x}]_{\mathcal{B}} \\ @VVV @VVV \\ 标准坐标向量 @<<{P_{\mathcal{B}} (标准坐标向量)}< \mathcal{B}坐标向量 \end{CD}\]可以行化简增广矩阵 $[P_{\mathcal{B}} \quad \mathbf{x}]$ 来求解 $[\mathbf{x}]_{\mathcal{B}}$ 而不必计算 $P^{-1}_{\mathcal{B}}$.
坐标映射
定理 8 $\quad$ 令 $\mathcal{B}=\{\mathbf{b_1,\cdots,b_n}\}$ 是向量空间 $V$ 的一个基,则坐标映射 $\mathbf{x} \mapsto [\mathbf{x}]_{\mathcal{B}}$ 是一个由 $V$映上到 $\Bbb R^n$ 的一对一的线性变换。
一般而言,从一个向量空间 $V$ 映上到另一个向量空间 $W$ 的一对一线性变换称为从 $V$ 到 $W$ 上的一个 同构(isomorphism),每一个在向量空间 $V$ 中的计算可以完全相同的出现在 $W$ 中,反之亦然。
例如,向量空间 $V$ 可以是:
- 多项式空间 $\Bbb P_3$ 到 $\Bbb R^4$ 上的同构
- $\Bbb R^3$ 中的一个2维平面到 $\Bbb R^2$ 上的同构
- $\Bbb R^n$ 到 $\Bbb R^n$ 上的同构 (不同的基)
4.5 向量空间的维数
定理 9 $\quad$ 若向量空间 $V$ 具有一组基 $\mathcal{B}=\{\mathbf{b_1,\cdots,b_n}\}$,则 $V$ 中任意包含多于 $n$ 个向量的集合一定线性相关.
定理 10 $\quad$ 若向量空间 $V$ 有一组基含有 $n$ 个向量,则 $V$ 的每一组基一定恰好含有 $n$ 个向量.
定义 $\quad$ 若 $V$ 由一个有限集生成,则 $V$ 称为有限维的,$V$ 的维数写成 $\dim V$,是 $V$ 的基中含有的向量个数,零向量空间 $\{\mathbf{0}\}$ 的维数定义为零. 如果 $V$ 不是由一个有限集生成,则 $V$ 称为无穷维的.
$\Bbb R^n$ 的标准基含有 $n$ 个向量,所以 $\dim \Bbb R^n = n$,标准的多项式基 {$1,t,t^2$} 表明 $\dim \Bbb P^2 = 3$,一般而言,$\dim \Bbb P^n = n+1$,所有多项式的空间 $\Bbb P$ 是无穷维的。
有限维空间的子空间
定理 11 $\quad$ 令 $H$ 是有限维向量空间 $V$ 的子空间,若有需要的话,$H$ 中任一个线性无关集均可以扩充为 $H$ 的一个基,$H$ 也是有限维的并且
\[\dim H \le \dim V\]定理 12 $\quad$ (基定理)
令 $V$ 是一个 $p$ 维向量空间,$p \ge 1$,$V$ 中任意含有 $p$ 个元素的线性无关集必须是 $V$ 的一个基. 任意含有 $p$ 个元素且生成 $V$ 的集合必须是 $V$ 的一个基.
$\mathrm{Nul}A$ 和 $\mathrm{Col}A$ 的维数
$\mathrm{Nul}A$ 的维数是方程 $A\mathbf{x}=\mathbf{0}$ 中自由变量的个数,$\mathrm{Col}A$ 的维数是 $A$ 中主元列的个数.
4.6 秩
行空间
若 $A$ 是一个 $m \times n$ 矩阵,$A$ 的每一行具有 $n$ 个数字,即可以视为 $\Bbb R^n$ 中的向量. 其行向量的所有线性组合的集合称为 $A$ 的 行空间,记为 $\mathrm{Row}A$.
定理 13 $\quad$ 若两个矩阵 $A$ 和 $B$ 行等价,则它们的行空间相同. 若 $B$ 是阶梯形矩阵,则 $B$ 的非零行构成 $A$ 的行空间的一个基同时也是 $B$ 的行空间的一个基.
警告 $\quad$ 行变换对矩阵的行不保持线性相关关系,若矩阵 $A$ 和 $B$ 行等价,$B$ 的行线性无关不能保证 $A$ 的行线性无关.
秩定理
定义 $\quad$ $A$ 的秩即 $A$ 的列空间的维数.
由于 $\mathrm{Row}A$ 与 $\mathrm{Col}A^T$ 相同,则 $A$ 的行空间的维数等于 $A^T$ 的秩.
定理 14 $\quad$ (秩定理)
$m \times n$ 矩阵 $A$ 的列空间和行空间的维数相等,这个公共的维数(即 $A$ 的秩)还等于 $A$ 的主元位置的个数且满足方程
\[\mathrm{rank}A + \dim \mathrm{Nul}A = n\]$\mathrm{rank}A$ 是 $A$ 中主元列的个数,$\mathrm{Nul}A$ 的维数是 $A$ 中非主元列的个数,显然有
\[主元列个数 + 非主元列个数 = 列的个数\]定理 $\quad$ (可逆矩阵定理 (续))
设 $A$ 是一 $n \times n$ 矩阵,则下面每个命题与 $A$ 是可逆矩阵的命题等价:
- $A$ 的列向量构成 $\Bbb R^n$ 的一个基
- $\mathrm{Col}A = \Bbb R^n$
- $\dim\mathrm{Col}A = n$
- $\mathrm{rank}A = n$
- $\mathrm{Nul}A = {0}$
- $\dim\mathrm{Nul}A = 0$
4.7 基的变换
定理 15 $\quad$ 设 $\mathcal{B}=\{\mathbf{b_1,\cdots,b_n}\}$ 和 $\mathcal{C}=\{\mathbf{c_1,\cdots,c_n}\}$ 是向量空间 $V$ 的基,则存在一个 $n \times n$ 矩阵 $\mathop{P}\limits_{\mathcal{C} \gets \mathcal{B}}$ 使得
\[\begin{aligned} [\mathbf{x}]_{\mathcal{C}} &= \mathop{P}\limits_{\mathcal{C} \gets \mathcal{B}} [\mathbf{x}]_{\mathcal{B}} \\[2ex] r_1\mathbf{c_1} + \cdots + r_n\mathbf{c_n} &= s_1[\mathbf{b_1}]_{\mathcal{C}} + \cdots + s_n[\mathbf{b_n}]_{\mathcal{C}} \\[2ex] r_1\mathbf{c_1} + \cdots + r_n\mathbf{c_n} &= s_1(t_{11}\mathbf{c_1} + \cdots + t_{1n}\mathbf{c_n}) + \cdots + s_n(t_{n1}\mathbf{c_1} + \cdots + t_{nn}\mathbf{c_n}) \end{aligned}\]其中
\[[\mathbf{x}]_{\mathcal{C}} = \begin{bmatrix} r_1 \\ \vdots \\ r_n \end{bmatrix} \qquad [\mathbf{x}]_{\mathcal{B}} = \begin{bmatrix} s_1 \\ \vdots \\ s_n \end{bmatrix} \qquad [\mathbf{b_1}]_{\mathcal{C}} = \begin{bmatrix} t_{11} \\ \vdots \\ t_{1n} \end{bmatrix} \qquad \cdots \qquad [\mathbf{b_n}]_{\mathcal{C}} = \begin{bmatrix} t_{n1} \\ \vdots \\ t_{nn} \end{bmatrix}\]$\mathop{P}\limits_{\mathcal{C} \gets \mathcal{B}}$ 的列是基 $\mathcal{B}$ 中向量的 $\mathcal{C}$-坐标向量,即
\[\mathop{P}\limits_{\mathcal{C} \gets \mathcal{B}} = [[\mathbf{b_1}]_{\mathcal{C}} \; [\mathbf{b_2}]_{\mathcal{C}} \; \cdots \; [\mathbf{b_n}]_{\mathcal{C}}]\]矩阵 $\mathop{P}\limits_{\mathcal{C} \gets \mathcal{B}}$ 称为由 $\mathcal{B}$ 到 $\mathcal{C}$ 的坐标变换矩阵。
上式中矩阵 $\mathop{P}\limits_{\mathcal{C} \gets \mathcal{B}}$ 的列是线性无关的,因为它们是线性无关集 $\mathcal{B}$ 的坐标向量,于是得到 $\mathop{P}\limits_{\mathcal{C} \gets \mathcal{B}}$ 是可逆的.
\[\left(\mathop{P}\limits_{\mathcal{C} \gets \mathcal{B}}\right)^{-1}[\mathbf{x}]_{\mathcal{C}} = [\mathbf{x}]_{\mathcal{B}}\]于是 $\left(\mathop{P}\limits_{\mathcal{C} \gets \mathcal{B}}\right)^{-1}$ 是将 $\mathcal{C}$-坐标变换 $\mathcal{B}$-坐标的矩阵,即
\[\left(\mathop{P}\limits_{\mathcal{C} \gets \mathcal{B}}\right)^{-1} = \mathop{P}\limits_{\mathcal{C} \gets \mathcal{B}}\]$\Bbb R^n$ 中基的变换
若 $\mathcal{B}=\{\mathbf{b_1,\cdots,b_n}\}$,$\mathcal{E}$ 是 $\Bbb R^n$ 中的标准基 $\{\mathbf{e_1,\cdots,e_n}\}$,则 $[\mathbf{b_1}]_{\mathcal{E}}=\mathbf{b_1}$,因此,$\mathop{P}\limits_{\mathcal{E} \gets \mathcal{B}}$ 与坐标变换矩阵 $P_{\mathcal{B}}$ 相同,即
\[\mathop{P}\limits_{\mathcal{E} \gets \mathcal{B}} = [[\mathbf{b_1}]_{\mathcal{E}} \; [\mathbf{b_2}]_{\mathcal{E}} \; \cdots \; [\mathbf{b_n}]_{\mathcal{E}}] = [\mathbf{b_1} \; \mathbf{b_2} \; \cdots \; \mathbf{b_n}] = P_{\mathcal{B}}\]五、特征值与特征向量
5.1 特征向量与特征值
定义 $\quad$ $A$ 为 $n \times n$ 矩阵,$\mathbf{x}$ 为非零向量,若存在数 $\lambda$ 使 $A\color{#08f}{\mathbf{x}} = \color{#f0f}{\lambda}\color{#08f}{\mathbf{x}}$ 成立,则称 $\color{#f0f}{\lambda}$ 为 $A$ 的特征值,$\color{#08f}{\mathbf{x}}$ 称为对应于 $\color{#f0f}{\lambda}$ 的特征向量.
数 $\lambda$ 是 $A$ 的特征值当且仅当方程
\[(A - \color{#f0f}{\lambda}I)\color{#08f}{\mathbf{x}} = \mathbf{0}\]有非平凡解. 这个问题等价于要求出所有的 $\lambda$,使得矩阵 $A-\lambda I$ 为不可逆矩阵,由2.4节定理4,该矩阵当它的行列式的值为零时是不可逆的,即 $\det(A-\lambda I)=0$. 该方程所有解的集合就是矩阵 $A - \lambda I$ 的零空间,称为 $A$ 的对应于 $\lambda$ 的特征空间. 特征空间由零向量和所有对应于 $\lambda$ 的特征向量组成.
定理 1 $\quad$ 三角矩阵的主对角线的元素是其特征值.
$0$ 是 $A$ 的特征值当且仅当 $A$ 为不可逆.
定理 2 $\quad$ $\lambda_1,\cdots,\lambda_r$ 是 $n \times n$ 矩阵 $A$ 相异的特征值, $\mathbf{v_1,\cdots,v_r}$ 是与 $\lambda_1,\cdots,\lambda_r$ 对应的特征向量,那么向量集合 $\{\mathbf{v_1,\cdots,v_r}\}$ 线性无关.
5.2 特征方程
定理 $\quad$ (可逆矩阵定理 (续))
设 $A$ 是 $n \times n$ 矩阵,则 $A$ 是可逆的当且仅当
- $0$ 不是 $A$ 的特征值.
- $A$ 的行列式不等于零.
定理 3 $\quad$ (行列式的性质)
设 $A$ 和 $B$ 是 $n \times n$ 矩阵.
- $A$ 可逆的充要条件是 $\det A \ne 0$.
- $\det AB = (\det A)(\det B)$.
- $\det A^T = \det A$.
- 若 $A$ 是三角形矩阵,那么 $\det A$ 是 $A$ 主对角线元素的乘积.
- 对 $A$ 作行替换不改变行列式的值. 作一次行交换使行列式值符号改变一次. 数乘一行后,行列式值等于用此数乘原来的行列式值.
特征方程
利用定理 3(1),我们可以通过行列式来判断矩阵 $A - \lambda I$ 是否可逆. 数值方程 $\color{red}{\det (A-\lambda I) = 0}$ 称为 $A$ 的特征方程.
\[\boxed{数 \lambda 是 n \times n 矩阵 A 的特征值的充要条件是 \lambda 是特征方程 \det(A - \lambda I) = 0 的根.}\]如果 $A$ 是 $n \times n$ 矩阵,那么 $\det(A-\lambda I)$ 是 $n$ 次多项式,称为 $A$ 的特征多项式.
一般的,$A$ 的特征方程的根 $r$ 的重数称为特征值 $r$ 的 (代数) 重数. 某 $6 \times 6$ 矩阵的特征多项式是 $\lambda^6-4\lambda^5-12\lambda^4$,因式分解后
\[\lambda^6-4\lambda^5-12\lambda^4 = \lambda^4(\lambda^2-4\lambda-12) = \lambda^4(\lambda-6)(\lambda+2)\]该矩阵的特征值是 $0$ (重数为 $4$),$6$ (重数为 $1$) 和 $-2$ (重数为 $1$).
因为 $n \times n$ 矩阵的特征方程包含有一个 $n$ 次多项式,如果算上重根,并允许有复根,则特征方程恰好有 $n$ 个根,复根称为复特征值.
相似性
假如 $A$ 和 $B$ 是 $n \times n$ 矩阵,如果存在可逆矩阵 $P$,使得 $P^{-1}AP = B$,或等价地 $A = PBP^{-1}$,则称 $A$ 相似于 $B$. 记 $Q = P^{-1}$,则有 $Q^{-1}BQ = A$,即 $B$ 也相似于 $A$,故我们简单的说 $A$ 和 $B$ 是相似的. 把 $A$ 变成 $P^{-1}AP$ 的变换称为相似变换.
定理 4 $\quad$ 若 $n \times n$ 矩阵 $A$ 和 $B$ 是相似的,那么他们有相同的特征多项式,从而有相同的特征值 (和相同的重数).
注意 $\quad$ 对矩阵作行变换通常会改变矩阵的特征值.
5.3 对角化
从分解式 $A = PDP^{-1}$,我们能够了解到有关矩阵 $A$ 的特征值和特征向量的信息. 分解式中的 $D$ 代表对角矩阵(Diagonal Matrix),很容易计算出 $D$ 的幂.
\[\begin{array}{l} D = \begin{bmatrix} 5 & 0 \\ 0 & 3 \end{bmatrix} \\[2ex] D^2 = \begin{bmatrix} 5 & 0 \\ 0 & 3 \end{bmatrix} \begin{bmatrix} 5 & 0 \\ 0 & 3 \end{bmatrix} = \begin{bmatrix} 5^2 & 0 \\ 0 & 3^2 \end{bmatrix} \\[2ex] D^3 = DD^2 = \begin{bmatrix} 5 & 0 \\ 0 & 3 \end{bmatrix} \begin{bmatrix} 5^2 & 0 \\ 0 & 3^2 \end{bmatrix} \end{array}\]一般地,有
\[对 k \ge 1, D^k = \begin{bmatrix} 5^k & 0 \\ 0 & 3^k \end{bmatrix}\]若 $A=PDP^{-1}$,其中 $P$ 为可逆矩阵,$D$ 为对角矩阵,那么 $A^k$ 的计算会很简单.
\[\begin{array}{l} A = PDP^{-1} \\[2ex] A^2 = (PDP^{-1})(PDP^{-1}) = PD\underbrace{(P^{-1}P)}_{I}DP^{-1} = PDDP^{-1} = PD^2P^{-1} \\[2ex] A^3 = (PDP^{-1})A^2 = (PD\underbrace{P^{-1})P}_{I}D^2P^{-1} = PDD^2P^{-1} = PD^3P^{-1} \end{array}\]一般地,有
\[A^k = PD^kP^{-1}\]如果方阵 $A$ 相似于对角矩阵,即存在可逆矩阵 $P$ 和对角矩阵 $D$,有 $A = PDP^{-1}$,则称 $A$ 可对角化.
定理 5 $\quad$ (对角化定理)
$n \times n$ 矩阵 $A$ 可对角化的充分必要条件是 $A$ 有 $n$ 个线性无关的特征向量.
事实上,$A=PDP^{-1}$,$D$ 为对角矩阵的充分必要条件是 $P$ 的列向量是 $A$ 的 $n$ 个线性无关的特征向量. 此时,$D$ 的主对角线上的元素分别是 $A$ 的对应于 $P$ 中特征向量的特征值.
换句话说,$A$ 可对角化的充分必要条件是有足够的特征向量形成 $\Bbb R^n$ 的基,我们称这样的基为特征向量基.
矩阵的对角化
一、 求出 $A$ 的特征值 (利用特征方程 $\det(A-\lambda I)=0$).
二、 求 $A$ 的 $n$ 个线性无关的特征向量 (利用 $(A-\lambda I)\mathbf{x}=0$ 求出特征空间的基).
三、 用第2步得到的特征向量构造可逆矩阵 $P$.
四、 用对应的特征值构造对角矩阵 $D$.
定理 6 $\quad$ 有 $n$ 个特征值的 $n \times n$ 矩阵可对角化.
特征值不是都相异的矩阵
定理 7 $\quad$ 设 $A$ 是 $n \times n$ 矩阵,其相异的特征值是 $\lambda_1,\cdots,\lambda_p$.
- 对于 $1 \le k \le p$,$\lambda_k$ 的特征空间的维数小于或等于 $\lambda_k$ 的代数重数.
- 矩阵 $A$ 可对角化的充分必要条件是所有不同特征空间的维数之和为 $n$. 即每个 $\lambda_k$ 的特征空间的维数等于 $\lambda_k$ 的代数重数.
- 若 $A$ 可对角化,$\mathcal{B}_k$ 是对应于 $\lambda_k$ 的特征空间的基,那么,集合 $\mathcal{B}_1,\cdots,\mathcal{B}_p$ 中所有向量的集合是 $\Bbb R^n$ 的特征向量基.
5.4 特征向量与线性变换
线性变换的矩阵
设 $V$ 是 $n$ 维向量空间,$W$ 是 $m$ 维向量空间,$T$ 是 $V$ 到 $W$ 的线性变换. 为了把 $T$ 与矩阵相联系,我们指定 $\mathcal{B}$ 和 $\mathcal{C}$ 分别是 $V$ 和 $W$ 的基.
若 $\mathbf{x} \in V$,坐标向量 $[\mathbf{x}]_{\mathcal{B}} \in \Bbb R^n$,$\mathbf{x}$ 的像 $T(\mathbf{x})$ 的坐标向量 $[T(\mathbf{x})]_{\mathcal{C}} \in \Bbb R^m$. 设 $V$ 的基 $\mathcal{B}$ 是 $\{\mathbf{b_1,\cdots,b_n}\}$,若 $\mathbf{x} = r_1\mathbf{b_1}+\cdots+r_n\mathbf{b_n}$,则
\[[\mathbf{x}]_{\mathcal{B}} = \begin{bmatrix} r_1 \\ \vdots \\ r_n \end{bmatrix}\]因为 $T$ 是线性的,故
\[T(\mathbf{x}) = T(r_1\mathbf{b_1}+\cdots+r_n\mathbf{b_n}) = r_1T(\mathbf{b_1}) + \cdots + r_nT(\mathbf{b_n}) \tag{5.1}\label{eq5.1}\]利用 $W$ 的基 $\mathcal{C}$,可以用 $\mathcal{C}$-坐标向量来改写 \eqref{eq5.1}
\[[T(\mathbf{x})]_{\mathcal{C}} = r_1[T(\mathbf{b_1})]_{\mathcal{C}} + \cdots + r_n[T(\mathbf{b_n})]_{\mathcal{C}} \tag{5.2}\label{eq5.2}\]向量等式 \eqref{eq5.2} 可以写为矩阵等式
\[[T(\mathbf{x})]_{\mathcal{C}} = M[\mathbf{x}]_{\mathcal{B}} \tag{5.3}\label{eq5.3}\]其中
\[M = [[T(\color{#a8f}{\mathbf{b_1}})]_{\color{#f0f}{\mathcal{C}}} \quad [T(\color{#a8f}{\mathbf{b_2}})]_{\color{#f0f}{\mathcal{C}}} \quad \cdots \quad [T(\color{#a8f}{\mathbf{b_n}})]_{\color{#f0f}{\mathcal{C}}}] \tag{5.4}\label{eq5.4}\]矩阵 $M$ 是 $T$ 的矩阵表示,称为 $T$ 相对于基 $\color{#a8f}{\mathcal{B}}$ 和 $\color{#f0f}{\mathcal{C}}$ 的矩阵.
\[\require{AMScd} \begin{CD} \mathbf{x} @>{T}>> T(\mathbf{x}) \\ @VVV @VVV \\ [\mathbf{x}]_{\mathcal{B}} @>{乘以M}>> [T(\mathbf{x})]_{\mathcal{C}} \end{CD}\]$V$ 到 $V$ 的线性变换
当 $W=V, \mathcal{C}=\mathcal{B}$时,\eqref{eq5.4} 中的 $M$ 称为 $T相对于\mathcal{B}的矩阵$,或简称为 $T的\mathcal{B}-矩阵$,记为 $[T]_{\mathcal{B}}$.
\[\require{AMScd} \begin{CD} \mathbf{x} @>T>> T(\mathbf{x}) \\ @VVV @VVV \\ [\mathbf{x}]_{\mathcal{B}} @>{乘以[T]_{\mathcal{B}}}>> [T(\mathbf{x})]_{\mathcal{B}} \end{CD}\]$V \to V$ 的线性变换 $T$ 的 $\mathcal{B}$-矩阵对所有 $V$ 中的 $\mathbf{x}$,有
\[[T(\mathbf{x})]_{\mathcal{B}} = [T]_{\mathcal{B}}[\mathbf{x}]_{\mathcal{B}} \tag{5.5}\label{eq5.5}\]$\Bbb R^n$ 上的线性变换
定理 8 $\quad$ (对角矩阵表示)
设 $A=PDP^{-1}$,其中 $D$ 为 $n \times n$ 对角矩阵,若 $\Bbb R^n$ 的基 $\mathcal{B}$ 由 $P$ 的列向量组成,那么 $D$ 是变换 $\mathbf{x} \mapsto A\mathbf{x}$ 的 $\mathcal{B}$-矩阵.
记 $P$ 的列向量为 $\mathbf{b_1,\cdots,b_n}$,则有 $\mathcal{B}=\{\mathbf{b_1,\cdots,b_n}\},P=[b_1\;\cdots\;b_n]$. 因此,$P$ 是坐标变换矩阵 $P_{\mathcal{B}}$
\[\mathbf{x} = P[\mathbf{x}]_{\mathcal{B}} 和 [\mathbf{x}]_{\mathcal{B}}=P^{-1}\mathbf{x}\]若 $\mathbf{x} \in \Bbb R^n, T(\mathbf{x})=A\mathbf{x}$,那么
\[\begin{aligned} [T]_{\mathcal{B}} &= [[T(\mathbf{b_1})]_{\mathcal{B}}\quad\cdots\quad[T(\mathbf{b_n})]_{\mathcal{B}}] & 由[T]_{\mathcal{B}}定义 \\ &= [[A\mathbf{b_1}]_{\mathcal{B}}\quad\cdots\quad[A\mathbf{b_n}]_{\mathcal{B}}] & 由T(\mathbf{x})=A\mathbf{x} \\ &= [P^{-1}A\mathbf{b_1}\quad\cdots\quad P^{-1}A\mathbf{b_n}] & 坐标变换 \\ &= P^{-1}A[\mathbf{b_1}\quad\cdots\quad\mathbf{b_n}] & 矩阵乘法 \\ &= P^{-1}AP \\ &= D & 相似性P^{-1}AP=D \end{aligned}\]矩阵表示的相似性
若 $A$ 相似于 $C$,即有 $A=PCP^{-1}$,如果 $\mathcal{B}$ 由 $P$ 的列向量组成,则 $C$ 是变换 $\mathbf{x} \mapsto A\mathbf{x}$ 的 $\mathcal{B}$-矩阵.
\[\require{AMScd} \begin{CD} \mathbf{x} @>{乘以A}>> A\mathbf{x} \\ @V{乘以P^{-1}}VV @AA{乘以P}A \\ [\mathbf{x}]_{\mathcal{B}} @>>{乘以C}> [A\mathbf{x}]_{\mathcal{B}} \end{CD}\]六、正交性和最小二乘法
6.1 内积、长度和正交性
内积
如果 $\mathbf{u}$ 和 $\mathbf{v}$ 是 $\Bbb R^n$ 空间中的向量,可以将 $\mathbf{u}$ 和 $\mathbf{v}$ 作为 $n \times 1$ 矩阵. 向量 $\mathbf{u}^T$ 是 $1 \times n$ 矩阵且矩阵乘积 $\mathbf{u}^T\mathbf{v}$ 是一个 $1 \times 1$ 矩阵,我们将其记为一个不加括号的实数. $\mathbf{u}^T\mathbf{v}$ 称为 $\mathbf{u}$ 和 $\mathbf{v}$ 的内积,记作 $\mathbf{u}\cdot\mathbf{v}$. 内积也称为点积. 如果
\[\mathbf{u} = \begin{bmatrix} u_1 \\ u_2 \\ \vdots \\ u_n \end{bmatrix} \qquad \mathbf{v} = \begin{bmatrix} v_1 \\ v_2 \\ \vdots \\ v_n \end{bmatrix}\]那么 $\mathbf{u}$ 和 $\mathbf{v}$ 的内积为
\[\mathbf{u} \cdot \mathbf{v} = \mathbf{u}^T\mathbf{v} = [u_1 \quad u_2 \quad \cdots u_n] \begin{bmatrix} v_1 \\ v_2 \\ \vdots \\ v_n \end{bmatrix} = u_1v_1 + u_2v_2 + \cdots + u_nv_n\]定理 1 $\quad$ 设 $\mathbf{u,v,w}$ 是 $\Bbb R^n$ 空间中的向量,$c$ 是一个数,那么
- $\mathbf{u}\cdot\mathbf{v} = \mathbf{v}\cdot\mathbf{u}$
- $(\mathbf{u+v})\cdot\mathbf{w} = \mathbf{u}\cdot\mathbf{w} + \mathbf{v}\cdot\mathbf{w}$
- $(c\mathbf{u})\cdot\mathbf{v} = c(\mathbf{u}\cdot\mathbf{v}) = \mathbf{u}(c\cdot\mathbf{v})$
- $\mathbf{u}\cdot\mathbf{u} \ge 0$,并且 $\mathbf{u}\cdot\mathbf{u}=0$ 成立的充分必要条件是 $\mathbf{u}=\mathbf{0}$
向量的长度
定义 $\quad$ 向量 $\mathbf{v}$ 的长度 (范数) 是非负数 $\|\mathbf{v}\|$,定义为
\[\|\mathbf{v}\| = \sqrt{\mathbf{v}\cdot\mathbf{v}} = \sqrt{v_1^2+v_2^2+\cdots+v_n^2},且 \|\mathbf{v}\|^2 = \mathbf{v}\cdot\mathbf{v}\]长度为 $1$ 的向量称为单位向量,如果把一个非零向量除以自身的长度,即乘 $\dfrac{1}{\|\mathbf{v}\|}$,就可以得到一个单位化的向量 $\mathbf{u}=\dfrac{\mathbf{v}}{\|\mathbf{v}\|}$. 这种把向量 $\mathbf{v}$ 化为单位向量 $\mathbf{u}$ 的过程,称为向量 $\mathbf{v}$ 的单位化,且此时 $\mathbf{u}$ 和 $\mathbf{v}$ 方向一致.
$\Bbb R^n$ 空间中的距离
定义 $\quad$ $\Bbb R^n$ 中向量 $\mathbf{u}$ 和 $\mathbf{v}$ 的距离,记作 $\mathrm{dist}(\mathbf{u},\mathbf{v})$,表示向量 $\mathbf{u-v}$ 的长度,即
\[\mathrm{dist}(\mathbf{u},\mathbf{v}) = \|\mathbf{u-v}\|\]正交向量
正交是线性代数中的一个通用术语,表示 $\Bbb R^n$ 空间中两个向量相互垂直.
定义 $\quad$ 如果 $\mathbf{u}\cdot\mathbf{v}=0$,则两个向量 $\mathbf{u}$ 和 $\mathbf{v}$ 称为 (相互) 正交的.
由 $\mathbf{0}^T\cdot\mathbf{v}=0$ 对任意 $\mathbf{v}$ 都成立,可以得出零向量与任意向量正交.
定理 2 $\quad$ (毕达哥拉斯 (勾股) 定理)
两个向量 $\mathbf{u}$ 和 $\mathbf{v}$ 正交的充分必要条件是 $\|\mathbf{u+v}\|^2 = \|\mathbf{u}\|^2 + \|\mathbf{v}\|^2$.
正交补
如果向量 $\mathbf{z}$ 与 $\Bbb R^n$ 的子空间 $W$ 中的任意向量都正交,则称 $\mathbf{z}$ 正交于 $W$. 与子空间 $W$ 正交的向量 $\mathbf{z}$ 的全体组成的集合称为 $W$ 的正交补,并记作 $W^{\bot}$ ($W^{\bot}$ 读作 $W$ 的正交补).
两个关于 $W^{\bot}$ 的性质:
- 向量 $\mathbf{x}$ 属于 $W^{\bot}$ 的充分必要条件是向量 $\mathbf{x}$ 与生成空间 $W$ 的任一向量都正交.
- $W^{\bot}$ 是 $\Bbb R^n$ 的一个子空间.
定理 3 $\quad$ 假设 $A$ 是 $m \times n$ 矩阵,那么 $A$ 的行向量空间的正交补空间是 $A$ 的零空间,且 $A$ 的列向量空间的正交补是 $A^T$ 的零空间:
\[(\mathrm{Row}A)^{\bot} = \mathrm{Nul}A 且 (\mathrm{Col}A)^{\bot} = \mathrm{Nul}A^T\]$\Bbb R^2$ 空间和 $\Bbb R^3$ 空间的角度
如果 $\mathbf{u}$ 和 $\mathbf{v}$ 是 $\Bbb R^2$ 或 $\Bbb R^3$ 中的非零向量,那么可以用内积,将从原点到点 $\mathbf{u}$ 和原点到点 $\mathbf{v}$ 的两个线段之间的夹角联系起来,对应的公式是:
\[\mathbf{u}\cdot\mathbf{v} = \|\mathbf{u}\|\|\mathbf{v}\|\cos\theta\]6.2 正交集
有 $\Bbb R^n$ 中的向量集合 $\{\mathbf{u_1,\cdots,u_p}\}$,如果集合中任意两个不同向量都正交,即当 $i \ne j$ 时,$u_i \cdot u_j = 0$,则该集合称为正交向量集.
定理 4 $\quad$ 如果 $S=\{\mathbf{u_1,\cdots,u_p}\}$ 是由 $\Bbb R^n$ 空间中非零向量构成的正交集,那么 $S$ 是线性无关集,因此构成所生成的子空间 $S$ 的一组基.
定义 $\quad$ $\Bbb R^n$ 中子空间 $W$ 的一个正交基是 $W$ 的一个基,且是正交集.
定理 5 $\quad$ 假设 $\{\mathbf{u_1,\cdots,u_p}\}$ 是 $\Bbb R^n$ 中子空间 $W$ 的正交基,对 $W$ 中的每个向量 $\mathbf{y}$,线性组合 $\mathbf{y}=c_1\mathbf{u_1}+\cdots+c_p\mathbf{u_p}$ 中的权值可以由 $c_j = \dfrac{\mathbf{y\cdot u_j}}{\mathbf{u_j}\cdot\mathbf{u_j}}\;(j=1,\cdots,p)$ 计算.
因此线性组合 $\mathbf{y}=c_1\mathbf{u_1}+\cdots+c_p\mathbf{u_p}$ 可以表示为 $\mathbf{y}=\dfrac{\mathbf{y \cdot u_1}}{\mathbf{u_1 \cdot u_1}}\mathbf{u_1}+\cdots+\dfrac{\mathbf{y \cdot u_p}}{\mathbf{u_p \cdot u_p}}\mathbf{u_p}$
单位正交集
由单位向量构成的正交集 $\{\mathbf{u_1,\cdots,u_p}\}$ 是一个单位正交集. 如果 $W$ 是一个由单位正交集生成的子空间,那么 $\{\mathbf{u_1,\cdots,u_p}\}$ 是 $W$ 的单位正交基.
正交集中向量被”单位化”后,具有单位长度,集合中新向量的正交性不变,因此新的集合成为单位正交基.
各列形成单位正交基的矩阵,在矩阵算法和计算中都非常重要,其性质由下面定理 6和定理 7给出.
定理 6 $\quad$ 一个 $m \times n$ 矩阵 $U$ 具有单位正交列向量的充分必要条件是 $U^TU=I$.
定理 7 $\quad$ 假设 $U$ 是一个具有单位正交列的 $m \times n$ 矩阵,且 $\mathbf{x}$ 和 $\mathbf{y}$ 是 $\Bbb R^n$ 的向量,那么
- $\|U\mathbf{x}\|=\|\mathbf{x}\|$.
- $(U\mathbf{x})\cdot(U\mathbf{y})=\mathbf{x}\cdot\mathbf{y}$.
- $(U\mathbf{x})\cdot(U\mathbf{y})=0$ 的充分必要条件是 $\mathbf{x}\cdot\mathbf{y}=0$.
一个正交矩阵就是一个可逆的方阵 $U$,且满足 $U^{-1}=U^T$,由定理6,这样的矩阵具有单位正交列。任何单位正交的方阵是正交矩阵.